|
United
States Naval Academy - Autonomous
Surface Vessel Team 2011 and 2012
The following table summarizes the utilized electrical components and provides a
brief description of their functions.
| Component |
Make/Model |
Specs. |
Function
|
| |
|
|
|
Battery
|
Cabela
|
12V, 8Ah
|
These two batteries provide a 12V and
24V bus.
|
Remote E-Stop
|
Custom PCB
|
|
The board
receives an RC signal that will disconnect primary power to the RoboteQ
board.
|
| Regulator |
Custom PCB
|
|
This board
generates a 6V bus for such low voltage devices as the RC receiver and
micro-processor.
|
RC switch board
|
Custom PCB
|
|
This board
receives an RC signal to switch between autonomous control and tele-operation.
|
RC receiver
|
Futaba
Model: T8FG
|
|
Receives RC
signals from corresponding Futaba transmitter.
|
Micro-processor
based IMU
|
Custom
PCB
|
|
This functional inertial measurement
unit is based around the Rabbit 3000 microprocessor. This board has the
following: 1) magnetic compass, 2) GPS (not utilized), 3) three axis
rate gyros, and 4) three axis accelerometers.
This board is primarily utilized for the low-level heading and thruster
control (it is able to achieve a control frequency of 30 Hz). It
receives it commands from the Sony laptop.
|
RoboteQ amplifier board
|
RoboteQ
Model: ADX1500
|
80V, 30A (continuous)
|
This board receives RC commands from that correlate to the voltage to
be applied to the thruster windings. Currently, we have maximum applied
voltage of 24V.
|
Sony VIA laptop
|
Sony
Model: VPCX116GX |
|
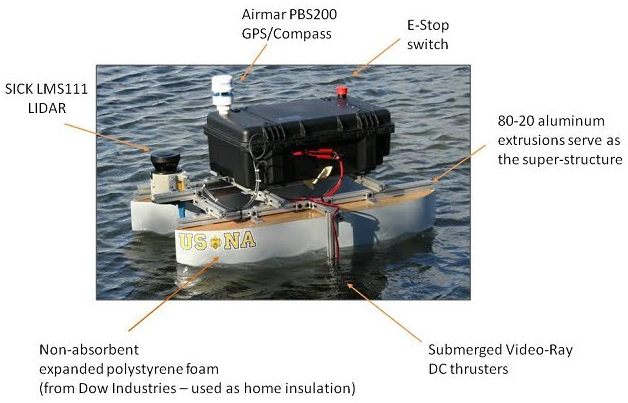
The laptop serves as the high-level navigation engine. It measures the
following: 1) GPS and heading from the Airmar, and 2) range to obstacles
from the SICK LM111. From these primary two measurements, it calculates
the desired heading and speed of the vehicle which is sent to the
micro-processor.
The laptop could not be utilized to provide low-level heading control as
the navigation loop frequency is on the order of 0.5 Hz.
The laptop is running under Windows XP and the navigation algorithms are
written within the MATLAB software environment. |
The USNA 2011 USV shaved a lot of weight off
the previous vessel
The design and construction efforts of Jon can be summarized in the
following table:
| Length |
Beam
|
Height
|
Draft |
Weight
|
| |
|
|
|
|
3.5 ft
(42 in)
|
2.6 ft
(31 in)
|
2.2 ft
(26 in)
|
0.8 ft
(9.5 in)
|
58
lbs
|
The following table discusses some of the selected equipment and their
corresponding functions:
| Component |
Model
|
Specs |
Function
|
| |
|
|
|
Airmar GPS
|
PBS200 |
Position: +/- 6
(ft)
Heading: +- 0.5 (deg)
|
The Airmar
sensor provides the GPS (x,y) position of the ASV. In addition, the
Airmar provides the navigation
|
SICK LIDAR
|
LMS111 |
+- 270 (deg) field of view.
16 (m) sensing range
|
The SICK sensor will be utilized to locate objects in the water out to
a distance of 16 (m).
The range returns are processed with a custom clustering algorithm that
allows for isolation of objects of a certain size (the buoys will
measured so we can filter out background returns such as the shore).
|
VideoRay thrusters
|
DC |
Produce approximately 10 (lbf) at 12V.
|
We opted to use the DC thrusters rather
than the BLDC thrusters due to availability of the RoboteQ power
amplifier (the RoboteQ is designed for dual DC motors).
|
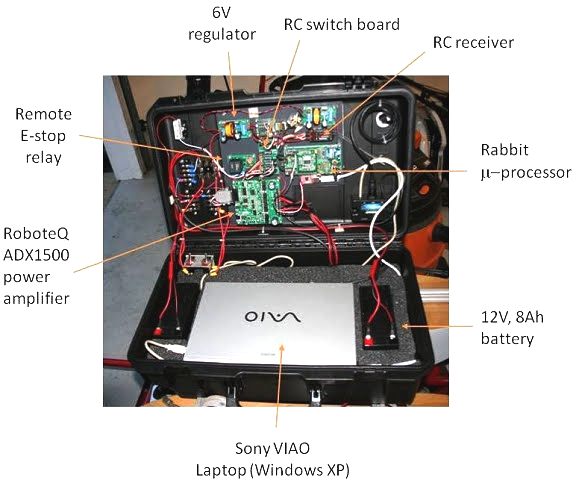
The Electrical Layout:
The same electrical schematic was carried over from the 2010 design; however,
the footprint was reduced to be contained within the pelican case.
Midn.
William Queen
|
Midn. Trentt
James
|
Midn. Jason
Kremers
|
ENS John
Weissberg
|
|

|

|

|

|
|
MIDN Queen serves as
the 2011 ASV team captain. Bill is primarily responsible for developing
the buoy chain navigation algorithm. He is a rising senior (1/C) at the
U.S. Naval Academy.
|
MIDN James is in
charge of the integration of vision capabilities on the ASV. Trentt is a
rising senior (1/C) at the U.S. Naval Academy.
|
MIDN Kremers has
provide an active Google Map/ MATLAB interface that utilizes vision
processing techniques to promote path planning (such as shore hugging).
Jason is a current senior at the U.S. Naval Academy.
|
ENS Weissberg is a 2010
graduate of the U.S. Naval Academy. John was a member of the 2010 ASV
team. Over the summer of 2010, he took lessons learned from the AUVSI
competition and designed and constructed the current year's vessel.
|


The Autonomous
Surface Vehicle Competition (ASVC), now the RoboBoat Competition, is a student competition based around unmanned boats operating under rules of the waterway. This includes littoral area navigation, channel following and autonomous docking. This is typically done with computer vision, multi-sensor fusion techniques, proactive and reactive path planning, and machine learning approaches using embedded systems within the vehicle.
The use of unmanned autonomous sailing craft for sustained oceanographic observations could result in sea surface measurements that have higher spatial and temporal resolution than contemporary methods such as Lagrangian floats, moored buoys, manned expeditions and satellite observations. Mission-specific autonomous sailing platforms could provide energetically sustainable mission-specific systems to forecast environmental events and to trace the distribution of meteorological and ocean conditions over a long-term period.
LINKS
http://gotransat.com/
www.RoboBoats.org
https://sites.google.com/site/usnaasv/2011-competition
http://www.auvsifoundation.org/foundation/competitions/roboboat/
http://www.auvsifoundation.org/foundation/competitions/robosub/
http://www.searobotics.com/
Bad
boy on the block, the ultimate RoboBoat. Solarnavigator uses an advanced SWASSH hull as the
platform to
mount the world's first autonomous circumnavigation. A fleet of such vessels could be the basis of an
international peacekeeping or emergency rescue force. Especially when
equipped with the Scorpion anti-pirate laser weapon.
|