|
UNIVERSITY of WESTERN AUSTRALIA Mobile Robot Lab - USAL Project
|
|
|
UNIVERSITY
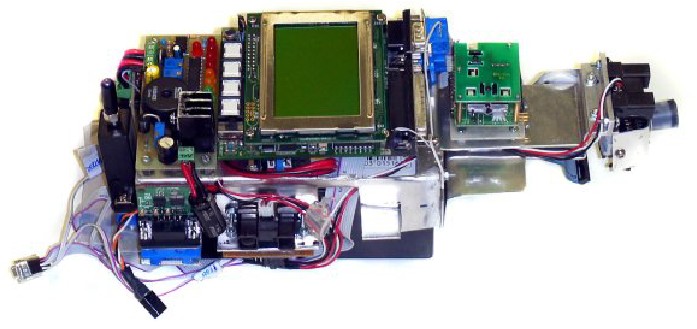
of WESTERN AUSTRALIA - USAL Autonomous Underwater Vehicle
LINKS
http://robotics.ee.uwa.edu.au/auv/usal.html www.eng.uah.edu/~fahimi/Platform_Boat.html www.gps4us.com/GPS-independent-navigation-system-for-autonomous-vessels http://en.wikipedia.org/wiki/Geodetic_system http://en.wikipedia.org/wiki/ECEF www.apl.washington.edu/projects/seaglider/summary http://robotics.ee.uwa.edu.au/auv/usal.html
Solarnavigator is a battery electric ASV (Autonomous Solar Vessel), a trimaran with an extremely efficient active hull that runs on solar power = energy from nature. This hull form has never been attempted before, nor has the use of wind energy been used in such manner for crew comfort (or complete onboard autonomy). A fleet of such vessels could be the basis of an international peacekeeping, and/or emergency rescue force.
Email:
+ 44 (0) 1323 831727 +44 (0) 7842 607865
Blueplanet Productions, Solar House, BN27 1RF, United Kingdom
Galley | Paints | Screens | Diving Project Estimates | Record Attempt | PR Events Batteries | Alloys | Timber | Composites | Navigation | Hydraulics Motors | Electronics | Solar Panels | Propeller | Transmission | Tooling | Life Support Tank Testing (Model Construction) & Results
The design of the Solar Navigator boat has been licensed for use in the John Storm series of books by Jameson Hunter
|
|
|
This website is copyright © 1991- 2012 Electrick Publications. All rights reserved. The bird logo and names Solar Navigator and Blueplanet Ecostar are trademarks ™. The Blueplanet vehicle configuration is registered ®. All other trademarks hereby acknowledged and please note that this project should not be confused with the Australian: 'World Solar Challenge'™which is a superb road vehicle endurance race from Darwin to Adelaide. Max Energy Limited is an educational charity working hard to promote world peace. |
|
|
AUTOMOTIVE | BLUEPLANET BE3 | ELECTRIC CARS | ELECTRIC CYCLES | SOLAR CARS | SOLARNAVIGATOR |