|
MICROTRANSAT
2013
The 2013 Microtransat is running for the duration of the year. Teams may depart at any time during the year. In a change from previous years, two different courses are being made available. One runs East to West (as in previous years) from a start line west of the
UK and
France and finishes in the Caribbean. The other starts off the north eastern coast of the
USA and south eastern coast of
Canada, it finishes off the west coast of
Ireland.
The East to West route start line is is between 48 and 51 degrees North along the line of 7 degrees and 30 minutes West. The finish line is along 60 degrees West between 10 and 25 degrees North.
The West to East route start line is along the line of 51 degrees and 30 minutes West, between 42 to 48 degrees North. The finish line is along the line of 11 degrees West between 45 and 55 degrees North.
Competing teams may depart from anywhere they choose, providing they cross the start line. Additionally the 40
nautical miles proceeding the start line must be sailed
autonomously. Teams must specify a target point on the finish line and must enter a 50km wide (diameter) circle around this point to complete the competition.
TEAMS
2013

Team Joker, Ascot, Berkshire, UK
Team Name: Team Joker (Robin's
Page - Robin Lovelock) (John's Page - John Silvester)
Location: Ascot, Berkshire, United Kingdom
Boat Names: Snoopy Sloop
Intended Route: East to West
Length: 1.26 m
Weight: 12.6 kg
Beam: 0.3 m
Draft: 0.3 m
Hull type: Marblehead fibre glass hull, foam filled.
Rig Design: A classical bermudan rig based on the International One Metre (IOM) #3 storm rig.
Power source: Solar panels, 5v NiMh battery
Actuators: Acoms AS-17 radio control servos.
Sensors: BR355 GPS
Communications: SPOT Satellite Messenger.
Computers: Picaxe
Emails:
john@team-joker.com
Websites:
http://www.team-joker.com/
http://www.gpss.force9.co.uk/
Robots Everywhere, Milan, Italy
Team Name: Robots Everywhere
Location: Milan, Italy
Boat Names: tbc
Intended Route: East to West
Length: 3.8m
Weight: 450kg
Beam: tbc
Draft: 120cm including keel
Hull type: tbc
Rig Design: tbc
Power source: Solar panels
Actuators: Concentric linear actuators (2 for sails, 1 for rudder), with a Pololu or RE
motor controller.
Communications: SPOT Satellite Messenger.
Computers: Parallax Propeller
Emails:
info@robots-everywhere.com
Websites:
http://robots-everywhere.com/site/
GA Sailing, Milledgeville, Georgia, USA
Team Name: GA Robot Sailing
Location: Milledgeville, Georgia, USA
Boat Names: Peyton, Joey, Addyson, Roman, Penelope
Intended Route: West to East followed by East to West
Length: 1.5m, 2m and 4m
Weight: tbc
Beam: tbc
Draft: tbc
Hull type: Sport Sloop
Rig Design: tbc
Power source: tbc
Actuators: Track Linear Actuators.
Communications: tbc
Computers: Picaxe
Emails:
Websites:

Autonomus, Horten/Tønsberg Norway
Team Name: Autonomus, founded by 9tek
Location: Horten/Tønsberg Norway
Intended Route: East to West
Boat Name: Autonomus (OE mark III)
Length: Waterline length 2.941m, Overall length 4.335m
Weight: 350 kg
Beam: 0.9m
Draft: 1m
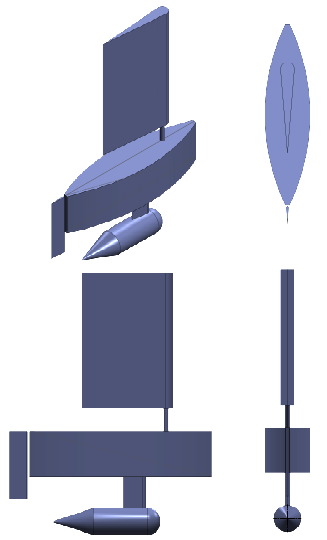
Hull type: The hull is a Norwegian hull designed by Ole Eide. It is a modified OE mark III hull designed for competing in the 2.4 mR class.
Rig Design: The rig is a special developed rig for the boat, with one fixed mainsail mounted over a pivotpoint motorized by a servo.
Power source: Lithium Ion batteries and Solar panels
Emails:
teni@9tec.no
Websites:
http://www.automasjonsutvikling.no/
https://sites.google.com/site/hiveda2012/
Beoga Beag, Galway, Ireland
Team Name: Beoga Beag
Location: Galway, Ireland
Boat Names: Beoga Beag
Intended Route: East to West
Length: 2.4 m
Weight: 6-12 kg
Beam: 0.3 m
Draft: 1.2 m
Hull type: Wood hard-chined hull with an epoxy coating and glass-tape reinforcement.
Rig Design: TBC, probably a wishbone boom and an unstayed mast.
Power source: Solar panels, 12 volt sealed lead acid batteries
Actuators: TBC
Communications: Iridium SBD modem
Computers: Alix 3d2 PC board for navigation and satellite communications and 2x ATMega8 boards for
steering, sail trim and environmental monitoring.
Other interesting information: The team members have sailed a Beneteau 40.7 from Galway to Saint Lucia in 2009, so we know what to expect. Or do we...?
Emails:
Websites:
http://twitter.com/beogabeag
http://beogabeag.org/
WHAT
IS A MICROTRANSAT?
The Microtransat Challenge is a transatlantic race of fully autonomous sailing boats. The race aims to stimulate the development of autonomous sailing boats through friendly competition.
The 2012 transatlantic race is open to competitors for the duration of the year. So far only two teams have begun the race. ENSTA-Bretagne started on June 27th 2012, unfortunately as of July 12th 2012 their boat had not sent any position reports for 10 days and therefore was been disqualified.
Team Joker started on November 27th 2012 from Barton-on-Sea in England, but came ashore near the Needles lighthouse on the Isle of Wight only 6 hours later. As of the 6th of December no further position reports had been received from the boat and it has been disqualified.
A map of both boat's progress can be seen on our the live maps page.
Other Upcoming Events
Sailbot 2013 - June 9th-13th 2013, hosted by Olin College of Engineering and the City of Gloucester, Massachusetts, USA.
HISTORY
The Microtransat Challenge was originally concieved in 2005 by Dr. Mark Neal of Aberystwyth University and Dr. Yves Briere of the Institut Supérieure de l'Aéronautique et de l'Espace (ISAE, formerly known as ENSICA) in Tolouse, France.
The first Microtransat competition took place on a lake near Toulouse, France in June 2006. Three teams (Aberystwyth University, ENSICA/IUT de Nantes and INNOC) took part.
The second competition took place on the Irish Sea off the coast of Aberystwyth, Wales, UK in September 2007. This was intended to give competitors a sample of what sailing at sea was like. Four teams (Aberystwyth University, ENSICA/IUT de Nantes, INNOC and Queens
University) took part.
A spin off competition, the World Robotic Sailing Championships was organised by INNOC (The Austrian Association for Innovative Computer Science) and took place in
Austria in May 2008.
The 2nd World Robotic Sailing Championships were organised by the University of Porto and took place in Matosinhos, Portugal in July 2009.
The 3rd World Robotic Sailing Championships were combined with the Sailbot competition. This event was hosted by Queens University in Kingston, Ontario, Canada and took place in June 2010.
The first transatlantic race started from Valentia, County Kerry, Ireland in September 2010. Only the team from Aberystwyth University were able to launch during this time. Their boat has had problems and was last reported off the north west coast of Ireland but stopped sending position messages. The course taken by their robot can be seen at
http://www.microtransat.org/tracking-2010.php
The 4th World Robotic Sailing Championships were organised by the University of Lubeck and took place in Lubeck, Germany in August 2011.
The second transatlantic race started in September 2011 with a start line stretching North/South from a point approximately 160 km west of Brest, France to a point approximately 200km west of Bideford, England. Only the team from ENSTA-Bretagne in Brest, France were able to launch. Their boat sailed for 8 days in total. Unfortunately it stopped making progress towards the start line after 2 days and gradually moved away from the start line, without having crossed it. The boat was spotted by a customs
aircraft 2 days later, the aircraft was able to take a picture of the boat showing that one of the sails had sustained damage. The team then decided to rescue the boat and were able to recover it 4 days later. The course taken by the boat can be seen at
http://www.microtransat.org/tracking-2011.php
The 5th World Robotic Sailing Championships were held in Cardiff,
Wales, UK in September 2012. They were hosted by Aberystwyth
University, with support from Cardiff
University.
TEAMS
2012
NSTA
Bretagne_Brest France
Ecole_Navale_Brest
France
Autonomus
Horten_Tonsberg Norway
Team
Joker_Ascot Berkshire UK
EXID
Paris, France
RULES
Safety:
Safety should take priority over winning.
Competitors may not attempt to inhibit other competitors by intentionally colliding with or obstructing their boat or by interfering with radio and electronic equipment.
All radio equipment must comply with appropriate International regulations.
Each boat must be equipped with a navigation light which is turned one during the hours of darkness. It should be visible from all directions and from a distance of at least 2
miles. The light maybe a single white light or a tri-colour red/white/green light.
Boats must take appropriate precautions to avoid collisions. This might include the use of
radar reflectors, brightly coloured panels, warning labels/flags or AIS transponders and avoiding known shipping lanes. Each team must decide the exact precautions they wish to take.
The boat owner is liable for any damage caused to their boat or by their boat. The organisers take no responsibility for any damage caused.
Boats must remain outside any defined exclusion zones.
Competitors must arrange permission for the boats to operate in the waters of their chosen country of departure.
Competitors are also responsible for arranging permission for their boat to enter the waters of their destination country and other countries along the way. Competitors are recommended to remain in international waters where possible.
Tracking of boats and transmission on data:
Each competitor will be required to provide their boat's position to the organisers via a web or email interface every 24 hours. Competitors are free to decide how this information is obtained and transmitted. A map showing each boat's position will be provided on this website. Any boat which fails to transmit for more than 10 consecutive days will be disqualified.
In addition to transmitting position data, each boat should keep a record onboard of its position at least once every 24 hours. A copy of this must be presented to the jury upon completion.
Competitors may transmit status information such as battery state from their boats.
During the race competitors may not transmit any information to their boats, including new waypoints, weather information or software updates. Any competitor which does will be disqualified. However if a competitor wishes to implement such features for use in an emergency or after the race, then they may do so on the understanding that their use during the race will result in disqualification. The jury may request to examine satellite phone bills, log files or
computer code if they suspect data has been sent to the boat.
Criteria for entry:
Every boat entered must fulfil the following criteria:
No source of propulsion other than wind.
The sailboat must be fully autonomous, no operator control is allowed.
The sailboat must be energetically autonomous, carrying on board any required batteries and electricity generating equipment.
The length of the boat must not exceed four metres.
The competition:
The aim of the competition is simple, to sail an autonomous sailing boat between Europe and the Caribbean in the fastest possible time.
The competition will start between January 1st and December 31st 2012. Competitors may launch at any time during this time.
The start point is between 48 and 51 degrees north, along the line of 7 degrees and 30 minutes west.
Competitors are responsible for transporting themselves and their boat to the starting line.
An approach of at least 40 nautical miles to the start line must be sailed autonomously. This is approximately along the line of 6 degrees and 30 minutes west.
The finishing line is the line of longitude between 10.00 degrees North, 60.00 degrees West and 25.00 degrees North 60.00 degrees West. Before departing, each team must choose a target area of 50km diameter along this line. A boat will only be considered to have finished the race when it reaches this 50km target, even if it has already crossed the finish line.
Judging Criteria:
How quickly the boat crosses the Atlantic between the designated start point and the team's target end point.
A handicap will be calculated by the jury based on the boat's hull length using the following formula: Time Corrected = Time * square root(length in metres)/square root(4 metres)
In the event of no boat reaching the finishing line, no winner will be declared.
The result will be given by the jury within one week of the last boat arriving or giving up. During this time each competitor will submit a complete log of positions (minimum of 1 every 24 hours) along with any contest or comment to the jury and to all other teams.
Notifying the organisers of your attempt:
Before departing please email registration@microtransat.org
with the following details:
Organisation Name and location (town/city and country)
A link to your website
Boat Name(s)
Measurements (length, beam and draft) in metres
Weight in kilograms
Details of your power source(s), actuators, computers and communications systems
Details of your hull and rig design
Any other interesting information about your boat
A photograph of your boat
A link to a video of your boat sailing autonomously
You may send in these details as a sign of your intention to compete, long before departure. This may help to improve publicity and show potential sponsors that you are registered.
As soon as possible after you launch email the date, time and GPS co-ordinates of the position where you launched the boat to
registration@microtransat.org

DECEMBER
8 2012 - SNOOPY SLOOP
Unmanned Atlantic boat Snoopy Sloop search draws blank. Snoopy Sloop was launched from Barton-on-Sea beach on 27 November
2012.
An unmanned boat which crashed off the Isle of Wight hours after it was launched in a bid to cross the Atlantic Ocean has still not been found.
Retired Nato scientist Robin Lovelock's 5ft (1.5m) boat Snoopy Sloop set sail from the Hampshire coast on 27 November but soon hit trouble.
It has been technically disqualified from the race to cross the ocean.
But Mr Lovelock has not given up hope in finding his boat and getting it re-entered into the competition.
The attempt was part of the Microtransat Challenge to become the first unmanned vessel to cross the Atlantic Ocean from a point to the south of
Ireland.
Since 2010, two French boats have foundered in bad weather and a University of Aberystwyth vessel suffered technical failure.
'Very unlucky'
As it has now been more than 10 days since Snoopy Sloop broadcast a tracking message the boat has been disqualified - but could be reinstated if it is found and re-launched.
Its last broadcast placed it near The Needles.
The boat's tracking system showed it on the Isle of
Wight, instead of on its way to the Bahamas
Mr Lovelock, from Sunninghill, Berkshire, blamed a strong tide for pushing the boat eastwards.
He said: "The good news is that he worked well - and he was very unlucky.
"A launch an hour earlier, or from a few hundred yards further west, and he might have made it past The Needles."
He developed the £450 boat on Bray Lake over the past four years.
A Global Positioning System (GPS)
computer was designed to pilot the boat for the 5,000 miles (8,000km) - taking about six months at 3mph.
He said members of the public have come forward with possible sightings of Snoopy but urged people not to put themselves in danger by trying to rescue the craft.
PREDICTIONS
This voyage could take up to six months because the rate of speed is only about 3 MPH. I will post a tracking site in the comment section after one is identified. Post one yourselves if you find it first...Thanks!
This Saturday, December 1st, 2012, the Snoopy Sloop unmanned Drone Boat is departing UK waters enroute to the U.S. shoreline or, more specifically, the Bahamas. Will it make it all the way? (BuckeyeTom's words: My dad was a CPO in the North Atlantic for several years. There were waves that crashed over the bridge on his ships. Picture the scenes from the
Clooney movie The Perfect
Storm, that is how my dad saw it. Can this flimsy four-foot drone make the trip?)
Lost at sea means that the boat is sank, cannot be found, retracted from the water, breaks down, craps out, runs out of gas, cannot continue and any other term you can think of which prevents it's ability to continue onward. I'd cover every possible aspect, except I am not a lawyer.
LINKS
microtransat.org
bbc.co.uk/news/uk-england-hampshire
Maidenhead
Advertiser Bray Holyport Fifield Solar powered robotic boat crashes after strong
winds
Go
transat.com
RoboBoats
http://beogabeag.org/
knew
the news Will Snoop Complete its Atlantic Ocean Voyage
http://www.gpss.force9.co.uk/autop.htm
http://www.gpss.force9.co.uk/rbdesign.htm
http://robots-everywhere.com/site/
http://www.automasjonsutvikling.no/
https://sites.google.com/site/hiveda2012/
http://www.picaxeforum.co.uk/showthread.php?18952-PICAXE-handling-GPS-for-robot-boat
The
ultimate RoboBoat. Solarnavigator uses an advanced SWASSH hull as the
platform
to
mount the world's first autonomous circumnavigation. A fleet of such vessels could be the basis of an
international peacekeeping, and/or emergency rescue force. Especially when
equipped with the Scorpion anti-pirate laser weapon.
|