|
HEXAPODS
|
|
|
Robots are working all over the world almost every day to make the lives of humans easier. Since the advent of microprocessors and computers, the possibilities for Robots to improve our civilisation are that much more.
We already have robot factories churning out cars to a higher standard, than those produced in manned factories. Simple domestic robots are finding their way onto the market to relieve us of tedious tasks. This is sure to mean more complex robots will be designed and become cheaper, to in turn, free humans more and more from everyday chores. Put this emerging technology together with renewable energy, such as solar cells, and the possibilities are endless. Not only could the world rely on plentiful renewable energy, but we'd have more time to devote to other problem areas in our society. We could build a higher society where food, energy, healthcare and transport are available to all.
For the above reasons I believe that we should encourage our children to become the engineers of tomorrow, to build on the current state of the art, to produce practical robotic solutions for our future.
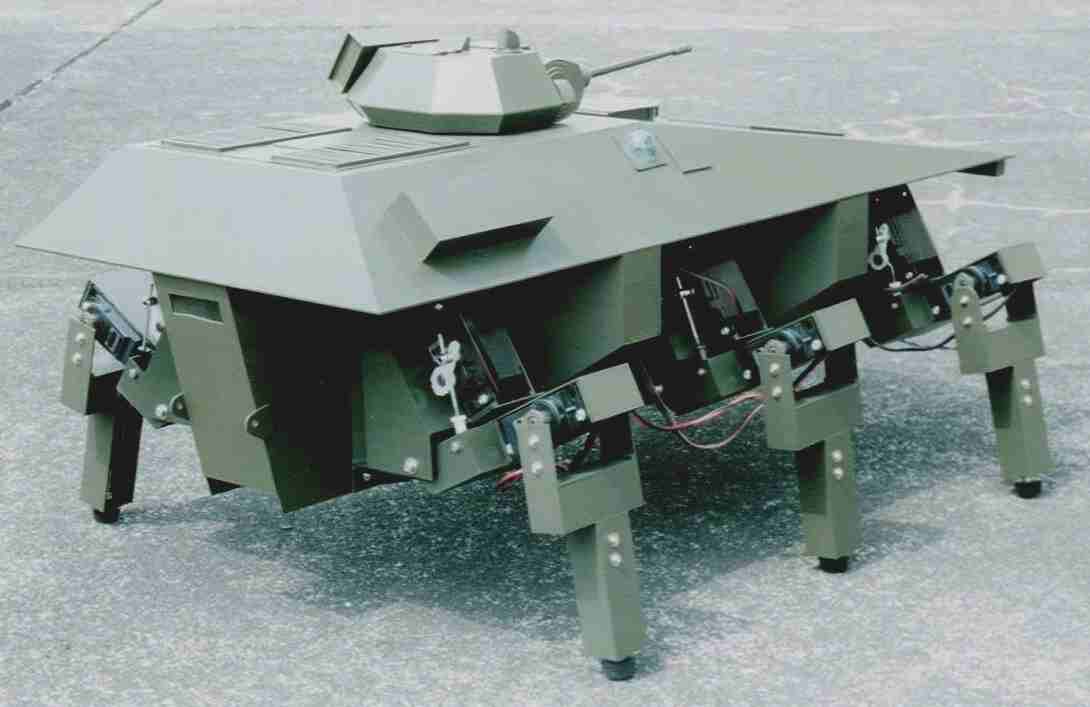
The term commonly refers to robots biologically inspired by Hexapoda locomotion. Hexapod robots are considered to be more stable than bipedal robots because in most cases hexapods are statically stable. Therefore, they do not have to depend on balance mechanisms, although, for a smoother walk, feedback and positive reaction will count for much.
Stewart platforms should not be confused with hexapods in the sense of a kind of six-legged walking robot. A Stewart platform, is a kind of parallel manipulator using an octahedral assembly of struts.
Hexapod robots are considered to be more stable than bipedal robots because in most cases hexapods are statically stable. Therefore, they do not have to depend on real-time controllers for standing or walking. Nonetheless, it has been demonstrated that at high walking speeds, insects do depend on dynamic factors.
Biologically Inspired
Furthermore, dynamics between insects and mechanical robots differ significantly because of their mass and size. Nonetheless, hexapod robots have demonstrated the ability to complete tasks that wheeled vehicles have failed.
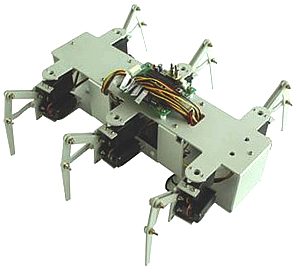
Hexapod
Walker Robot
Hexapod Walker Robot is quite similar in mechanism as quadruped walker robot, but it has 2 more legs of each 2 degree of freedom. (i.e., totally 6 legs and 2 degree of freedom for each leg) And consequently, 4 more servo motors are equipped. (12 servo motors in total) This robot delivers more stable and natural walking action than quadruped robot. By experiencing this product, users can understand and learn about the moving or walking algorithm. Besides, by using extension module such as proper sensors, etc., you can diversify its movement. That is, if you adopt some sensor module in it, then, the robot moves forward avoiding collision against front obstacles or tracing after some specific objects. Users also can make their own program or modify supplied program with ease.
Features
http://dajin.en.ec21.com/product detail Hexapod Walker Robot
LINK and REFERENCE
Lurking beneath the Antarctic ice is a discovery that scientist will die for.
BIPEDS | CYBEE | HEXAPODS | MANTIS | OCTOPODS QUADRUPEDS | ROBOBEE | ROBOT ANT | SPIDERBOT | STOMPY | TRIPODS
....... The World in Your Hands
|
|
|
This website is copyright © 1991- 2023 Electrick Publications. All rights reserved. The bird logo and names Solar Navigator and Blueplanet Ecostar are trademarks ™. The Blueplanet vehicle configuration is registered ®. All other trademarks hereby acknowledged and please note that this project should not be confused with the Australian: 'World Solar Challenge'™which is a superb road vehicle endurance race from Darwin to Adelaide. Max Energy Limited is an educational charity working hard to promote world peace.
|
|