|
|
|||||||||
|
1/10th scale SWATH (small waterplane area twin hull) ROBOT MODEL DEVELOPMENT
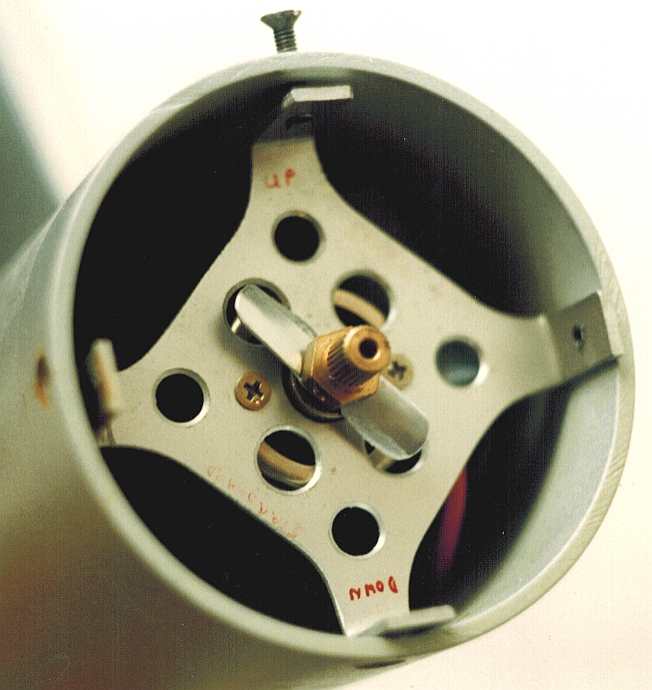
This model used two ordinary mabuchi 640s, one in each hull, driving a 70mm triple bladed propeller directly via a universal nylon coupling. A neat touch is the fan which circulated air within the hull and cooled the motors. The accuracy of the mounting cage is crucial. The cage is made of a heavy gauge aluminium. Each hull also had a miniature diaphragm bilge pump operated by an electronic sensor supplied by Hunter Systems. Thus, if there were any small leaks, the vessel could cope.
In 1993 it was proposed by our designer that a solar powered boat would be able to circumnavigate the globe using only energy from nature. He displayed the first of his development models at the Earls Court boat show in London in 1994.
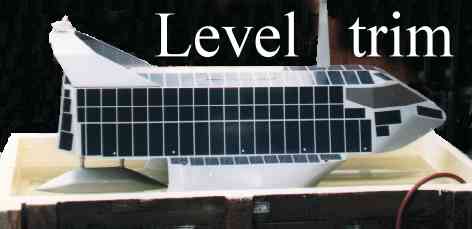
This is thought to be the first model boat to incorporate switch-able automatic functions to obtain level passage. Most full size SWATH hulls have computer controlled underwater trim fins fore and aft. The MKII Solar Navigator from 1996 onwards was able to trim with pumps and float switches. It was best to determine level running in calm water before commencing a passage. With fine tuning this system could have been developed to trim for minimum drag. This is so because with all pumps working together you could not only adjust attitude, but also the running depth of the hulls.
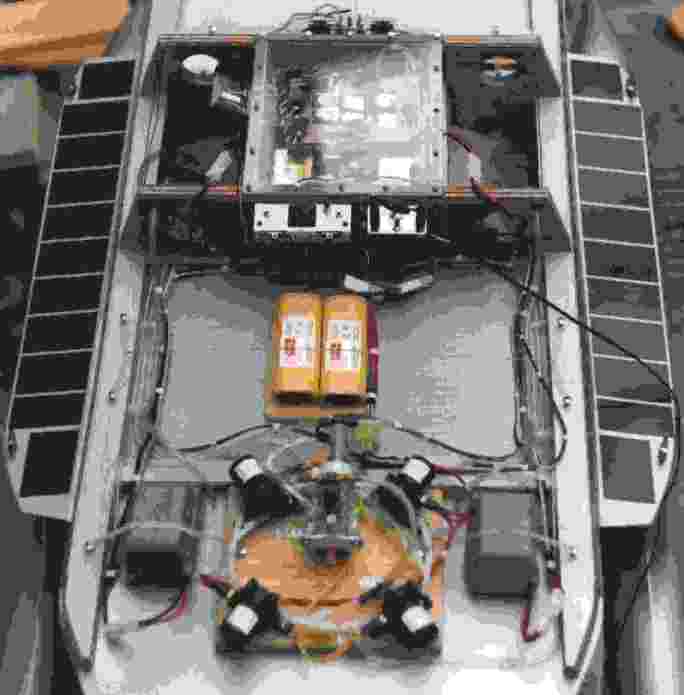
The radio equipment, propulsion motors and trim pump circuits each had their own batteries, that could be charged all at the same time by a series of switches, then decoupled for independence in operation. Each charging circuit has its own meter to keep the operator informed as to the health of the systems. The meters were accessible through a top hatch in the model body. LEDs were also used to monitor on/off and charging status. It's all very basic stuff, but get the foundations of a project right and the rest will be a lot easier.
The radio equipment is tucked inside this sealed box, an intrinsic part of the hull design. Cables going in and out of the waterproof chamber pass through silicone sealant. The lid is ordinary Plexiglas, mated to the wooden box via compressible rubber sealing trips. Plexiglas is liable to fracture, so many screws were used, countersunk to spread point loads. You can see the Hitec motor speed controllers and trim tank servos, micro-swithces, etc in this picture.
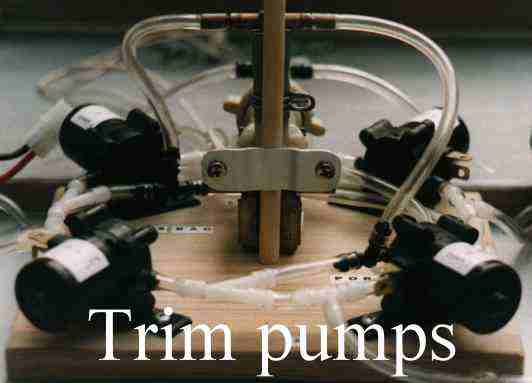
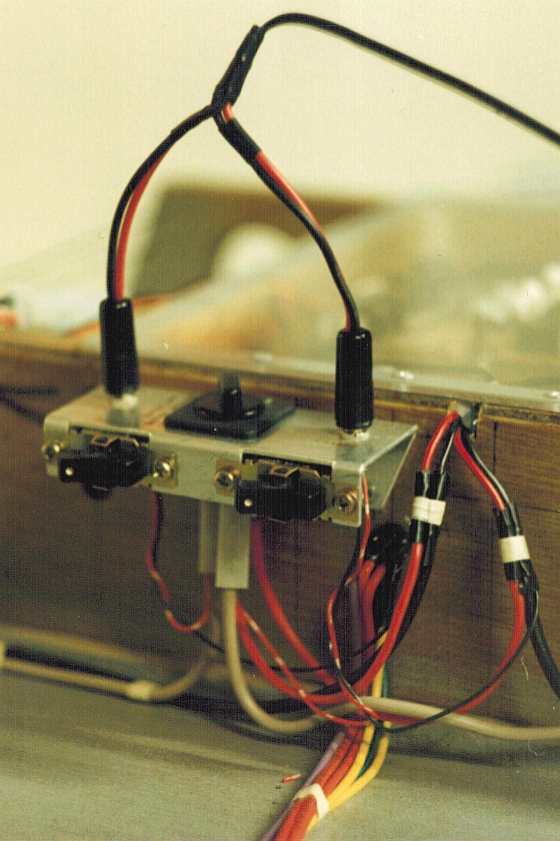
Four of the trim pumps are included on one board, with a water flow solenoid operated open/close switch - actually a part from a washing machine. Using this combination of pumps, each tank in the hull could be filled or emptied separately to the other tanks, or in combination with other tanks, so that on the radio control joysticks, trimming became relatively easy. Those are the battery packs for the trim pumps. Being a solar powered boat, it is important to have sufficient battery capacity to store energy for the harsh weather.
Solar powered boats provide marine architects with new challenges. There are as yet no conventions. Nobody knows what will work best, because so little has been put to the test. We can attest to that because we've tried 5 hull designs to date, improving on each one as we learn from the last. Two SWATH designs (one above), two catamarans and a trimaran. The 6th design is not strictly speaking a trimaran, it does though have three hulls; so we're billing it as a trimaran. A hull design like this has not been built to date, to overcome the ever present drag and wave drag dilemma. In theory it has all the qualities of a proa, but only if the robotic functions work as well as expected.
The other major challenge is panel design. How do you increase panel area and get as much of it facing the sun when the sun moves relative to the route, and of course keep the boat stable in all seas. We wanted at least 2 kilowatts per ton of vessel mass and can comfortably achieve that. Not to detract from the incredible achievements of the PlanetSolar team, but the SolarNavigator project aims to improve on the record 0f 585 days set in May 2012 with our brand new design. Our advantage is that we have more than twice the power to weight ratio of the current record holder with a lower drag hull. This needs to be verified before we can go to the construction stage.
This project represents a unique opportunity for any global company with eco friendly ambitions. If this is of interest to you please let Blueplanet Productions know using the contact details below. See the breathtaking video of PlanetSolar below to get a handle on the sort of publicity that Solarnavigator can generate.
Planet Solar Youtube
On the 4th of May 2012 the theory was proven to be correct by Raphael Domjan and his superb boat the Turanor Planetsolar, thanks to generous sponsorship by Candido Swiss watches and Immosolar, leaders in the field of solar energy management.
Now the benchmark has been set, it will undoubtedly inspire others. As with so many things once a pioneer has shown the way, inevitably, the record stands like mountain to be scaled.
CLICK ON THE PICTURE BELOW TO SEE THE LATEST MODEL BUILD IN PROGRESS
The latest autonomous boat is a battery electric trimaran with an extremely efficient robotic active hull that runs on solar and wind power. The model shown here is just 150mm long. The radio controlled test model is close on 3.0 meters in length. The test programme leads into autonomous mode, to include COLREGs compliant collision avoidance.
Email: bluefish@bluebird-electric.net or phone UK:
+ 44 1323 831727 (no messages on this service)
Bluebird Marine Systems Ltd. Solar House, BN27 1RF, United Kingdom
Intelligent Battery Support System
The model fully clothed sits atop the Pirate treasure chest exhibition stand. You can just see the service hatch in the middle of the deck. If the boat rolled over in a storm, it would not sink because of the foam included in the build. The vital radio control equipment was in a sealed chamber. This model could not self-right at the time development ceased. The real vessel had pumping systems for emergencies and a bubble hull. This was the first autonomous concept boat, though the robotic method of control of the navigation system was kept a closely guarded secret. An updated version has now been published in a British Patent Application dating from 2013.
|
|||||||||
|
This website is copyright © 1991- 2013 Electrick Publications. All rights reserved. The bird logo and names Solar Navigator and Blueplanet Ecostar are trademarks ™. The Blueplanet vehicle configuration is registered ®. All other trademarks hereby acknowledged and please note that this project should not be confused with the Australian: 'World Solar Challenge'™which is a superb road vehicle endurance race from Darwin to Adelaide. Max Energy Limited is an educational charity.
|