|
BRUCE THE AUTONOMOUS PILOT
|
|||||||||||||||||||||||||||||||
|
In the crewed vessels of old a boat was steered using a compass heading plotted on charts. A crew member would adjust the course of the boat using a tiller connected to a rudder, or with the ships wheel connected via cables or hydraulics to the rudder(s). This was a demanding job for experienced crew members who must read the compass needles and make course corrections to keep the boat on course. The course was plotted on the chart to begin with before the voyage and the heading (the angle in degrees of the compass) to the next destination (waypoint) was the instruction to the helmsman to steer toward.
Today, this task can be handed to an autopilot, which steers the boat automatically to the next waypoint.
Add a Chart Plotter and paper charts and the traditional magnetic compass become redundant. Add an autopilot and the skipper becomes redundant, save for inputting the waypoints (a waypoint is a compass bearing, or rather a point of longitude and latitude) from one destination to another. Note here that an autopilot does not control the boat speed, it just steers the boat to keep it on course.
A skipper comes into his own when something out of the ordinary happens, such as something breaks on the boat; another ship veers into your course, pirates attack the ship, or there is a Mayday call to be answered - even a man overboard distress signal - but we'll come to that when we introduce Captain Nemo.
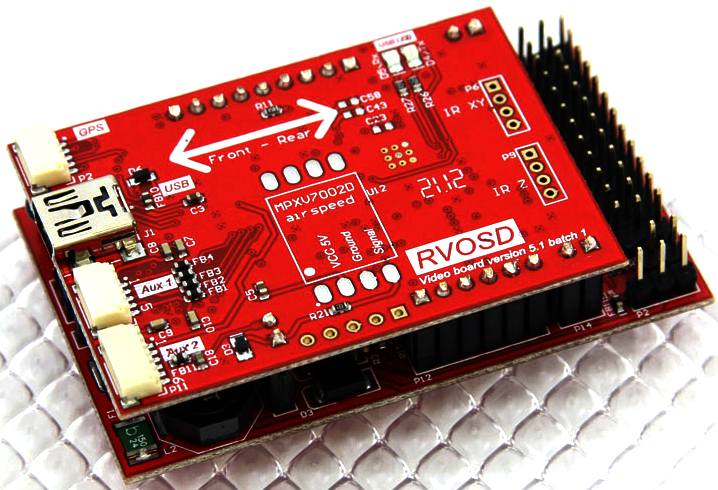
An autonomous autopilot, is one where the skipper is replaced for all of the usual navigation events with an onboard computer based skipper. In this Project we refer to our autonomous skipper as Bruce. The picture below is of a model aircraft autonomous autopilot, where if the model goes out of radio range, so that the human pilot has lost control, this tiny box of tricks will take control and automatically return the aircraft to the point of origin.
This tiny microcomputer, linked to a GPS antenna, a radio receiver and a camera, can pilot a model aircraft back to base all by itself for just $299. $299 purchase includes: (1) RVOSD (1) GPS (1) 70A current sensor (1) IR Remote (4) 150mm male to male wires. Integrated sensors include: - 2x Gyro 1x accelerometer - Barometric pressure sensor - Magnetometer. Flying by video is much the same as flying a drone aircraft, only a hobby version of the military systems for the Predator by General Atomics
2. BRUCE THE AUTOPILOT
Development of the basic digital steering controls depends on a proportional rudder servo and motor speed controller. This system would provide control in a similar manner to a remote (radio) control system, through general throttle and rudder commands.
An Autopilot, though, goes one stage further being driven by a digital signal via a program, to instruct a mechanical tiller or hydraulic actuator servos, to steer a course from one point on the planet (bearing A) to another point on the planet (bearing B) using the GSP to establish the boat's position. These bearings are called waypoints and the waypoints are all strung together via a computer program, linked to a visual display generated from digital maps, rather than paper charts.
With an origin and destination provided, and constant waypoint comparison with the boat's actual position, the distance and direction between them can be easily calculated and corrections made - a hundred times a second if necessary.
If SolarNavigator is to achieve a world circumnavigation unaided, Bruce the computer skipper must go one step further. An Autopilot and Chart Plotter cannot anchor a boat, nor dock a boat. For that we need something special. For that we need Onboard Robotics, to carry out all the functions that a human crew might perform - automatically.
CONVENTIONAL SELF STEERING GEAR
Electronic self-steering is controlled by electronics operating according to one or more input sensors, invariably at least a magnetic compass and sometimes wind direction or GPS position versus a chosen waypoint. The electronics module calculates the required steering movement and a drive mechanism (usually electrical, though possibly hydraulic in larger systems) causes the rudder to move accordingly.
Depending on the sophistication of the control unit (e.g. tiller pilot, steering wheel attached Chartplotter, ...), electronic self-steering gear can be programmed to hold a certain compass course, to maintain a certain angle to the wind (so that sailing boats need not change their sail trim), to steer towards a certain position, or any other function which can reasonably be defined. However, the amount of power required by electrical actuators, especially if constantly in action because of sea and weather conditions, is a serious consideration. Long-distance cruisers, which have no external source of electricity and often do not run their engines for propulsion, typically have relatively strict power budgets and do not use electrical steering for any length of time. As the electronic autopilot systems require electricity to operate, many vessels also make use of PV solar panels or small wind turbines on the boat. This eliminates extra pollution and cuts costs.
C-Map owns this ‘historic’ machine, which is thought to be the first chart plotter sold in the U.S in 1985. Navionics founders Giuseppe Carnevali and Fosco Bianchetti developed the first crude vector charts and this Datamarine-labeled plotter to show them. (Bianchetti later founded C-Map). About 5 years later the first PC based charting programs came out.
CHART
PLOTTING MACHINES - THE NEXT LEVEL
Modern
chartplotters may integrate GPS data with an electronic navigational chart (ENC). The chartplotter displays the ENC along with the position, heading and speed of the ship, and may display additional information from radar, automatic information systems (AIS) or other sensors. As appropriate to particular marine applications, chartplotters may also display data from other sensors, such as
echolocators/sonar.
Electronic chartplotters are by nature processor intensive. They need to retrieve the GPS signal and overlay that on a map updating every few milliseconds. Some GPS software can run on standard computers, but most of the higher end is dedicated equipment. Especially when the chartplotter generates three-dimensional displays, as used for fishing, considerable processing power and video memory can be needed.
SELF RIGHTING
Capsize drill is something most serious catamaran and trimaran sailors familiarize themselves with. No matter how well a boat is designed it is always a compromise. In the normal course of events it is unlikely that SolarNavigator could overturn. Captain Nemo would have folded the solar wings and lowered the hull into the sea to act as a sea anchor, at the first hint of a serious storm, which should cope with the forces that might roll the boat over, such as a freak wave in the Perfect Storm.
But what if Captain Nemo is taking a nap? Let us say that a serious wave has managed to roll the Navigator over. The danger is that if there are passengers, they may be injured. Bruce will attempt to right the boat the moment storm conditions subside. The SolarNavigator has a bubble hull. What that means is that if inverted, the watertight hatches close and seal. A typical boat hull is not watertight and cannot form a safety bubble. There are some exceptions, such as lifeboats, many of which are self-righting. Remember Tony Bullimore? He was lucky to be rescued - his racing yacht could not self-right, but at least it did not sink when inverted.
Capsize and righting practice for sailors on a small trimaran
SUMMARY
Well, so far so good, with this off-the-shelf equipment, the SolarNavigator can be set to steer itself around the world. The next part of the puzzle is to make sure that the vessel can cope with storms. A Cartrplotter cannot do that.
RETURN TO MAIN AUTONOMOUS MENU
2. BRUCE THE AUTOPILOT & A BIT MORE 3. STAR WARS - DRONE SATELLITE REMOTE CONTROL, MANUAL OVERRIDE 4. HAL COMPUTER HARDWARE 6. THE EYES AND EARS - HAWKEYE 7. SELF DEFENCE - SCORPION 8. CAPTAIN NEMO - AI ROBOT 9. LOCAL NAVIGATION EVENT 10. INTERMEDIATE CIRCUMNAVIGATION 11. THE AUTONOMOUS CIRCUMNAVIGATION
LINKS
www.eng.uah.edu/~fahimi/Platform_Boat.html www.gps4us.com/GPS-independent-navigation-system-for-autonomous-vessels http://en.wikipedia.org/wiki/Geodetic_system http://en.wikipedia.org/wiki/ECEF www.apl.washington.edu/projects/seaglider/summary http://www97.homepage.villanova.edu/hashem.ashrafiuon http://www.rangevideo.com/index.php product
|
|||||||||||||||||||||||||||||||
|
This website is copyright © 2013 Electrick Publications. All rights reserved. The bird logo and names Solar Navigator and Blueplanet Ecostar are trademarks ™. The Blueplanet vehicle configuration is registered ®. All other trademarks hereby acknowledged and please note that this project should not be confused with the Australian: 'World Solar Challenge'™which is a superb road vehicle endurance race from Darwin to Adelaide. Max Energy Limited is an educational charity working hard to promote world peace.
|